

 QQ
QQ
一、配置通讯前软件准备
打开WorkViual软件

添加DTM样本,点击工具,选择DTM样本管理,弹出下面对话框:
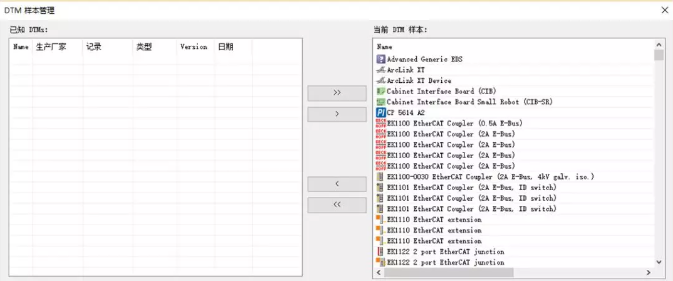
点击查找安装的DTM,左侧会弹出已存在的样本,样本如下图:
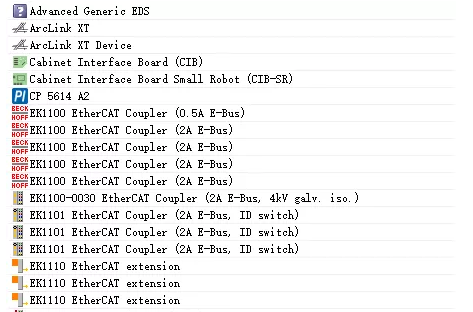
点击>>,然后点击OK
点击工具,选择备选软件包管理;
点击安装,根据文件存储路径选择ArcTechBasic,点击打开,软件将自动安装。安装完成后将出现以下界面;
添加设备说明文件:
点击文件,选择
选择导入设备说明文件:

点击搜索,选择文件存放路径:
将文件类型改为ESI,否则不显示设备说明文件:

选择beckhoffekxxx - 0080。XML,单击open,然后添加Beckhoff El6xxx。和lan9252-SPIXMl-103.XML(使用DeviceNet通信时添加文件),以及lan9252-SPIXMl-103.XML(使用EtherCat通信时添加文件)。此时,所有的准备工作都准备好了(注意:Lan9252-spixml-103)。XML是octave EtherCat设备描述文件,由octave, BeckhoffEKxxxx 0080提供。XML和Beckhoff El6xxx。XML是octave设备描述文件,需要从octave***网站下载)。
二 DeviceNet通讯配置(Ethercat通讯时忽略此步骤)
电脑连接机器人控制柜,打开机器人工程,并激活控制器(注意:配置前将机器人工程备份好)。

1、控制系统激活后,显示“已激活控制”。点击“总线结构”前面的+,系统中当前存在的总线就会显示出来;
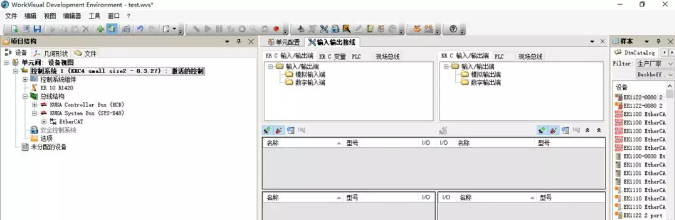
2、DeviceNet通讯配置:
选择“总线结构”,右键点击添加,弹出DTM选择对话框,选择图书卡机器人ExtensionBus(SYs-X44)。;
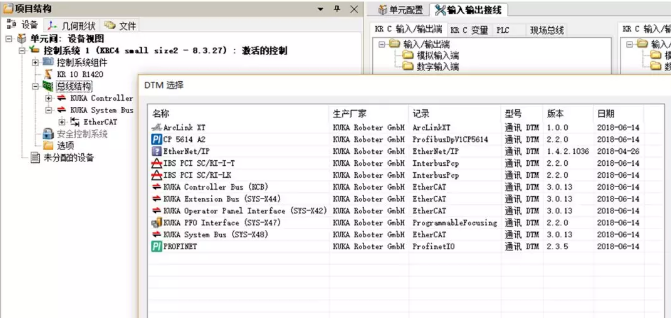

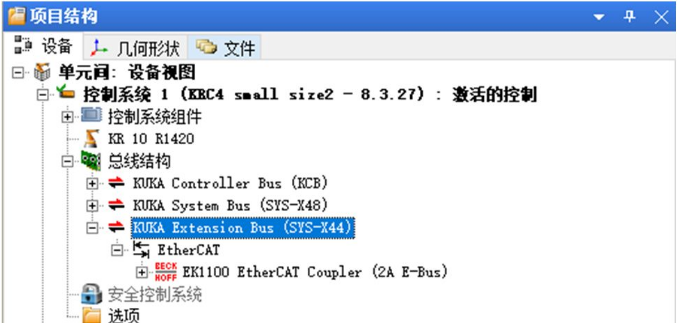
添加成功后在总线结构下会出现KUKA ExtensionBus(SYS-X44)
添加EK1100模块:右键KUKA ExtensionBus(SYS-X44),选择添加,弹出DTM选择对话框,选择EK1100 EtherCatCoupler (2A E-Bus)(同时存在很多个EK1100 EtherCat Coupler (2AE-Bus),选择第1个);

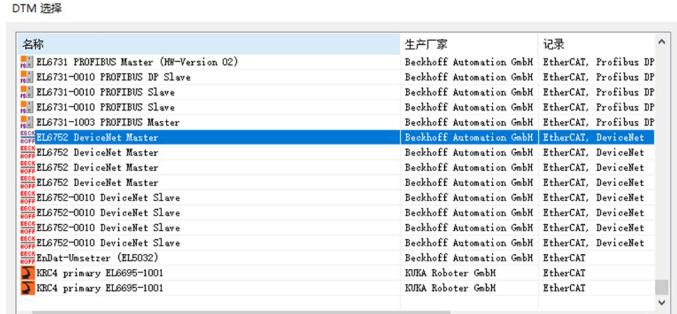
添加DEVICENET通讯模块:选择EK1100 EtherCatCoupler (2A E-Bus),右键选择添加,在DTM选择对话框中选择EL6752 DeviceNetMaster(同时存在很多个EL6752 DeviceNet Master,选择第1个即可)
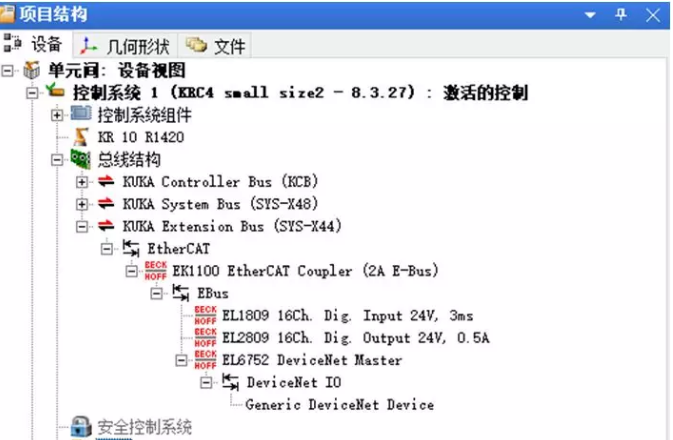
以上模块全部添加成功后在项目结构中可以全部显示出来

添加通用Devicenet设备:点击EL6752 DeviceNetMaster前的+,选择DeviceNet IO,右键选择添加,在DTM选择对话框中选择***的选项,点击OK;

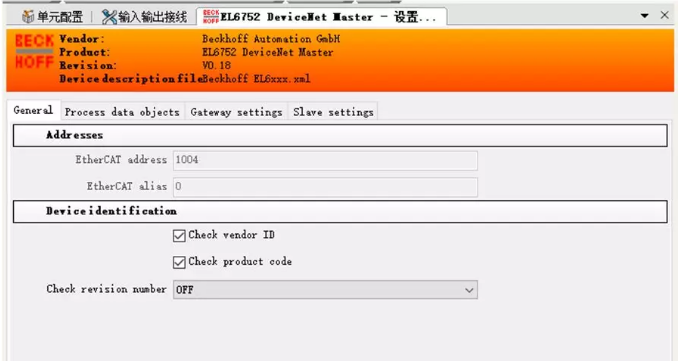
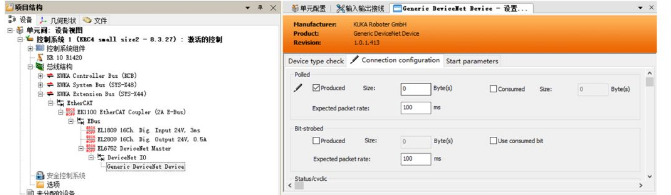
更改DeviceNet通讯波特率以及通讯地址:双击EL6752 DeviceNetMaster,右侧会出现设置界面,如下:
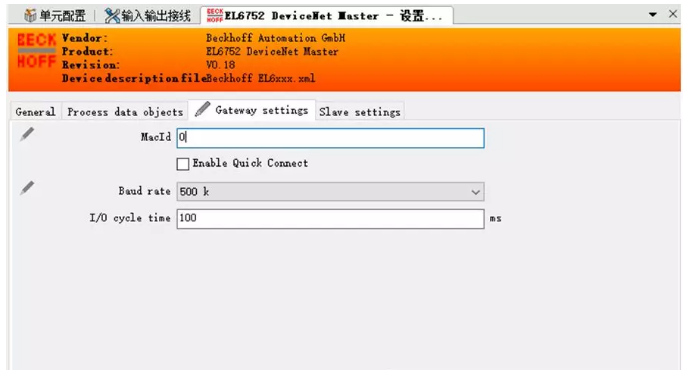
点击Gateway settings,将Mac Id更改为0,Baud rate更改为500K
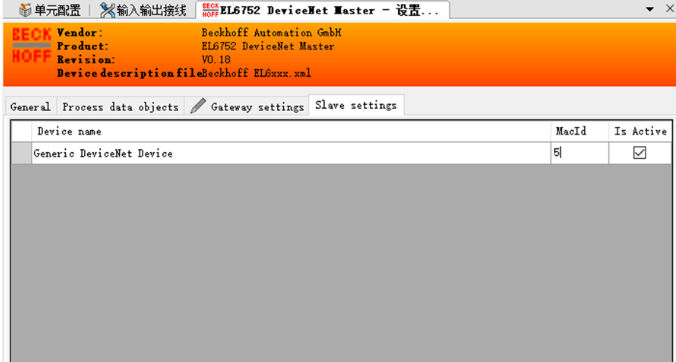
点击Slave settings,将MacId更改为5(注意:添加成功后界面中的Is Active下面有√),更改完成后点击Apply,然后点击OK;
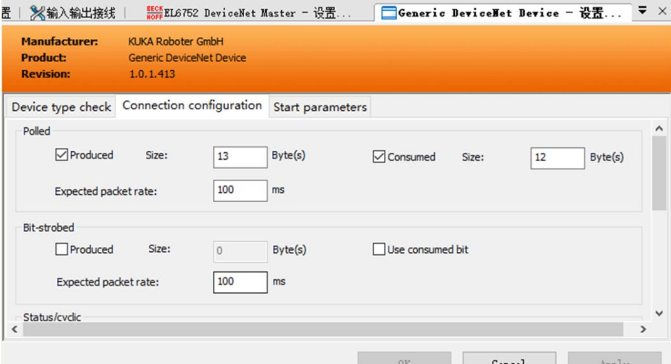
更改DeviceNet设备的输入输出信号:双击EL6752 DeviceNetMaster下的Generic DeviceNet Device,右侧的对话框中选择Connecttionconfiguration,勾选Polled下面的Produced以及Consumed,将对应的选项更改为13和12,如下图所示,更改完成后点击Apply,然后点击OK;
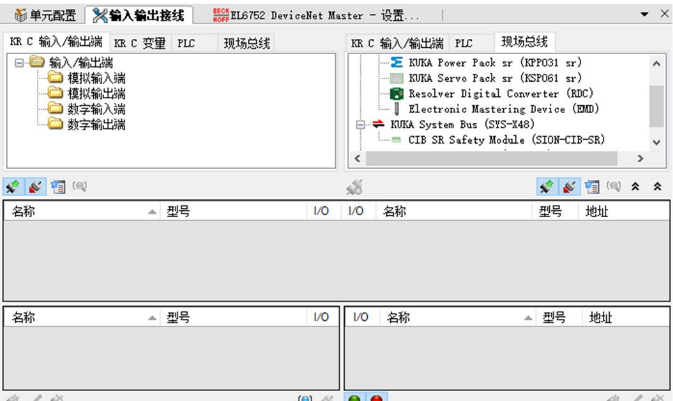
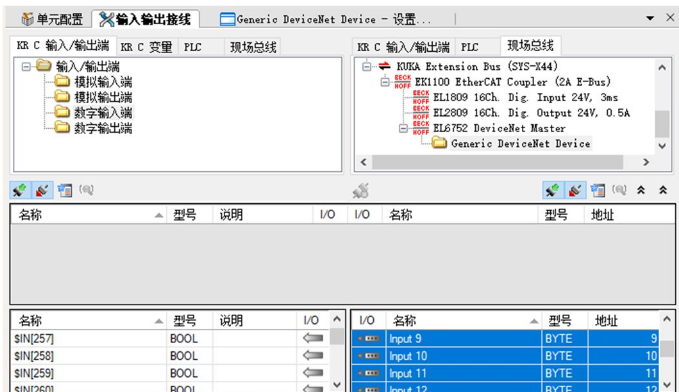
以上的模块以及参数更改完成后,在单元配置的右侧的输入输出总线会出现相应的内容;
3、DeviceNet模块信号链接:
输入信号与数字输入端链接:右侧现场总线点击Generic DeviceNetDevice,左侧点击数字输入端,下面的界面会显示相应的信号,如下图:
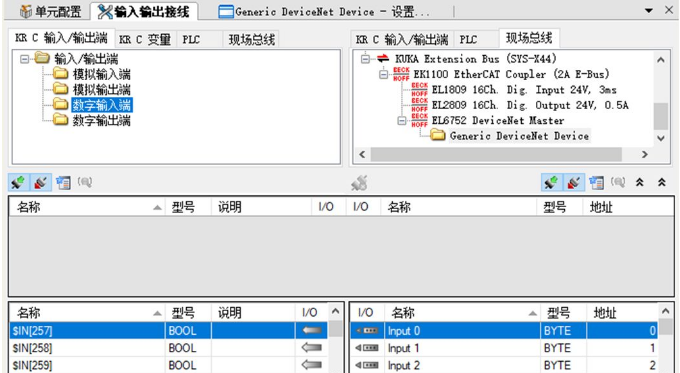
在[257]在链接之前,选择左边的输入信号,从右边输入0开始,然后按住SHIFT选择所有输入0到12日,右击在[257],连续点击链接时,会出现一个提示符,如下图所示,选择选项来完成输入信号的链接;
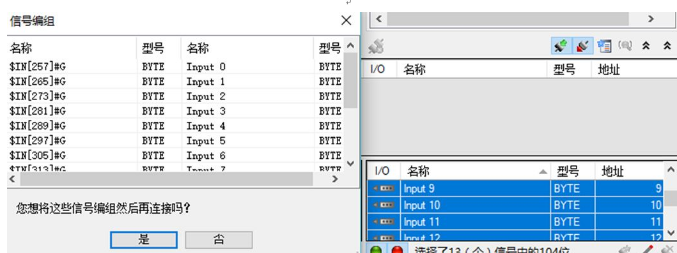
链接成功状态如下:
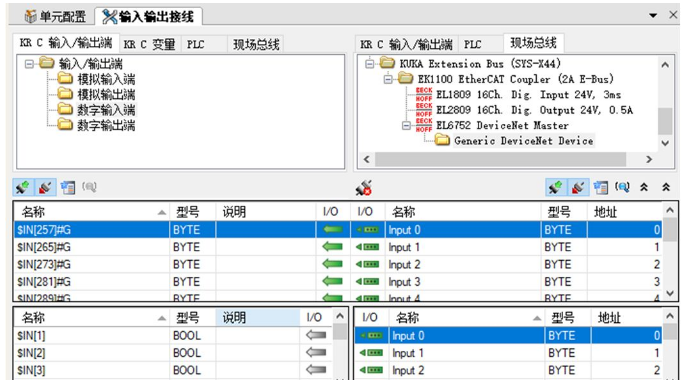
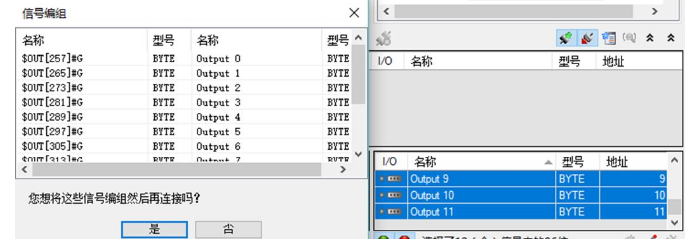
输出信号与数字输出端链接:链接方法同上;

以上内容转载于网络
更多:库卡机器人
